欢迎访问专业五金冲压加工厂家-深圳市鹏丰精密五金有限公司

全国服务热线:



时间: 2024-11-26 12:33:00 | 作者: 实力展示
TCP的途径不一致,变化无常,而且有时会伴有轴承、变速箱或其它方位宣布的噪音。
5、轴承损坏或破损(特别假如耦合途径不一致而且一个或多个轴承宣布滴答声或冲突噪音时)。
5、经过盯梢噪音找到有毛病的伺服电机。剖析ABB机器人TCP的途径确认哪个轴从而确认哪个电机可能有毛病。

1、检查程序是否包括逻辑指令(或其它“不花时刻”履行的指令),由于此类程序在未满意条件时会形成履行循环。
要防止此类循环,能够终究靠增加一个或多个WAIT指令来来测验。仅适用较短的WAIT时刻,以防止不用要地减慢程序。
2、保证每个I/O板的I/O更新时刻距离值没有太低(这些值运用RobotStudio更改)。

2、ABB机器人作业周期运转特定轴太困难。研讨是不是能够在应用程序编程中写入小段“冷却周期”。特别是转移重量级物品的时分。

ABB机器人停机的原因十分多,紧迫中止和安全维护设备遭到监控,因而控制器能够检测就任何毛病,而且在问题处理之前ABB机器人会中止。
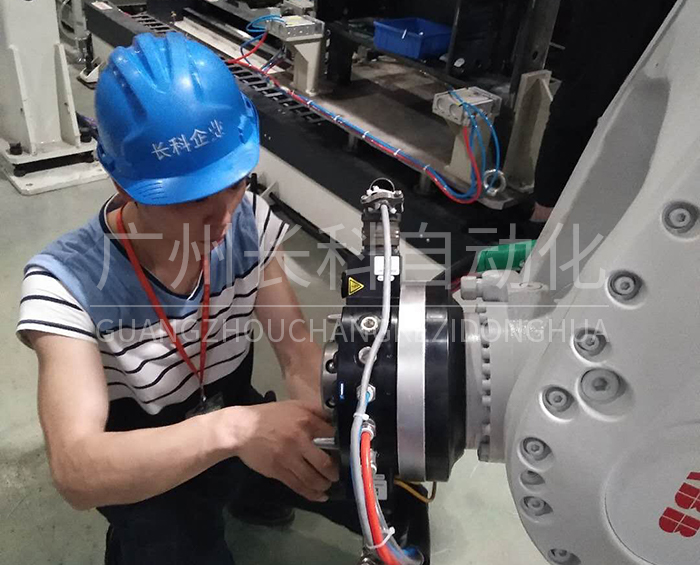
广州长科主动化为各大工厂修理了各式各样不同类型的ABB机器人,处理过多种类型的毛病,对毛病的原因一目了然,若你遇到处理不了的毛病,请联络咱们。